事件相机
AirSim 提供了一个基于 Python 的事件相机模拟器,旨在实现高性能并能够与模拟环境实时运行。
事件相机¶
事件相机是一种特殊的视觉传感器,它测量对数亮度的变化,并仅报告“事件”。每个事件是一组四个值,当对数亮度的绝对变化超过某个阈值时,就会生成一个事件。事件包含测量的时间戳、像素位置(x 和 y 坐标)以及极性:根据对数亮度是增加还是减少的情况,其值为 +1 或 -1。大多数事件相机的时间分辨率在微秒级别,这使得它们的速度显著快于 RGB 传感器,并且具有高动态范围和低运动模糊。有关事件相机的更多详细信息,请参阅 RPG-UZH 的这个教程。
AirSim 事件模拟器¶
AirSim 事件模拟器使用两幅连续的 RGB 图像(转换为灰度),并根据图像之间的对数亮度变化计算“过去事件”。这些事件作为字节流报告,格式如下:
<x> <y> <timestamp> <pol>
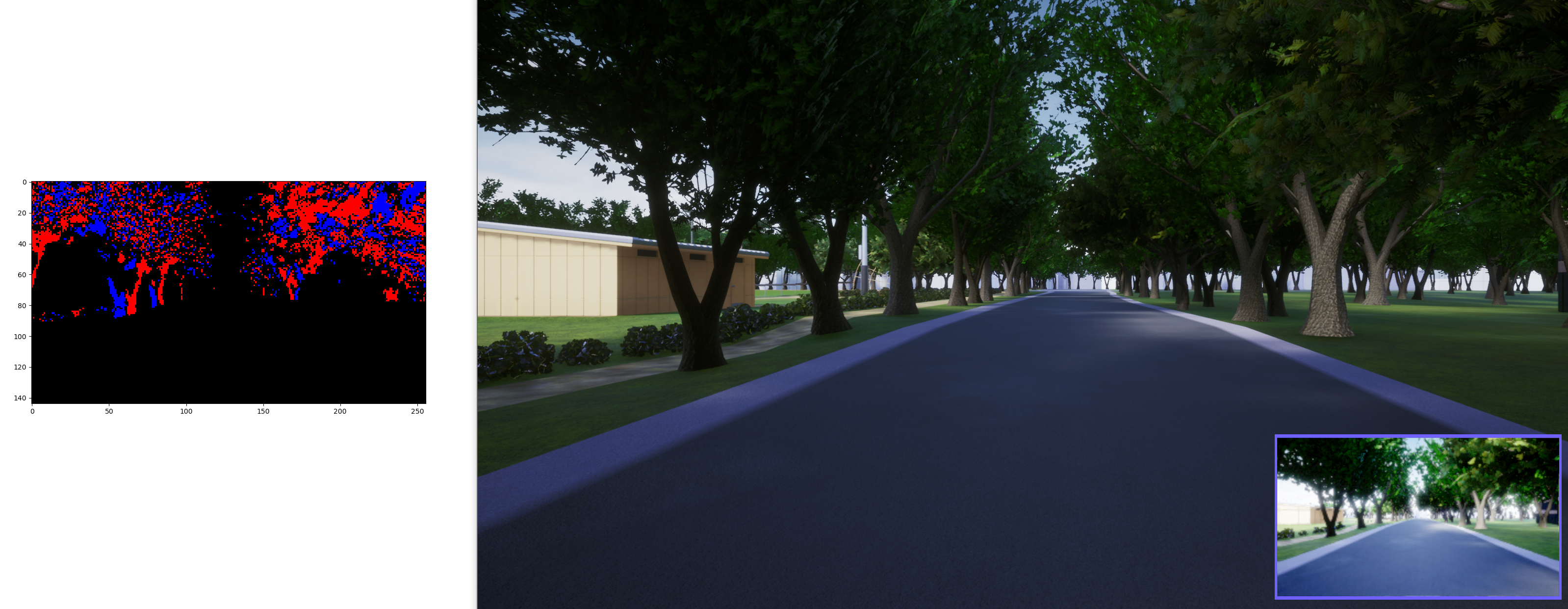
x 和 y 是事件触发的像素位置,timestamp 是以微秒为单位的全局时间戳,pol 是根据亮度是增加还是减少而定的 +1/-1。除了这个字节流,还构建了一个二维帧的事件累积,称为“事件图像”,它将 +1 事件可视化为红色像素,将 -1 事件可视化为蓝色像素。下面是一个事件图像的示例:
用法¶
用于与 AirSim 一起运行事件模拟器的示例脚本位于 https://github.com/microsoft/AirSim/blob/main/PythonClient/eventcamera_sim/test_event_sim.py。可以将以下可选命令行参数传递给该脚本。
args.width, args.height (float): 模拟事件相机分辨率
args.save (bool): 是否将事件数据保存到文件,args.debug (bool): 是否将模拟事件显示为图像
实际事件模拟的实现,使用 Python 和 numba 编写,位于 https://github.com/microsoft/AirSim/blob/main/PythonClient/eventcamera_sim/event_simulator.py。事件模拟器的初始化如下,参数控制相机的分辨率。
from event_simulator import *
ev_sim = EventSimulator(W, H)
事件的实际计算通过 image_callback 函数触发,每当获取到新的 RGB 图像时,该函数就会被执行。第一次调用该函数时,由于没有“前一”图像,它充当事件模拟的初始化。
event_img, events = ev_sim.image_callback(img, ts_delta)
该函数的行为类似于回调(每次接收到新图像时调用),返回的事件图像为一维的 +1/-1 值数组,指示每个像素处是否看到了事件,但不指示事件的时间/数量。这个一维数组可以通过函数 convert_event_img_rgb 转换为红/蓝事件图像。events 是一个包含事件的 numpy 数组,每个事件的格式为 <x> <y> <timestamp> <pol>。
通过这个函数,事件模拟计算过去图像和当前图像之间的差异,并计算出一系列事件,这些事件随后作为一个 numpy 数组返回。然后,可以将其附加到文件中。
有许多参数可以调整,以实现事件模拟的视觉保真度/性能。主要需要调整的因素包括:
- 相机的分辨率。
- 对数亮度阈值
TOL,用于确定检测到的变化是否算作事件。
注意:目前每对图像生成的事件数量也有一个最大限制,这个限制也可以调整。
算法¶
事件模拟器的工作大致遵循以下操作步骤:
1. 获取当前帧与前一帧的对数亮度差。
2. 遍历所有像素,根据对数亮度变化的阈值计算每个像素的极性。
3. 根据超出阈值的亮度变化程度确定每个像素要触发的事件数量。设 $N_{max}$ 为单个像素最多可以发生的事件数量,则在像素位置 $u$ 处模拟的总触发次数为 $N_e(u) = min(N_{max}, \frac{\Delta L(u)}{TOL})$。
4. 通过插值计算每个事件的时间戳,以便在前后的图像捕获之间的经过时间插值。
$t = t_{prev} + \frac{\Delta T}{N_e(u)}$
5. 通过在每个像素上模拟事件并按时间戳排序来生成输出字节流。