图像 API¶
如果您不熟悉 AirSim API,请先阅读 通用 API 文档。
获取单张图像¶
以下是从名为 "0" 的相机获取单张图像的示例代码。返回的值是 png 格式图像的字节。有关获取无压缩图像、其他格式以及可用相机的信息,请查看下一部分。
Python¶
import airsim #pip install airsim
# 对于汽车使用 CarClient()
client = airsim.MultirotorClient()
png_image = client.simGetImage("0", airsim.ImageType.Scene)
# 对图像进行处理
C++¶
#include "vehicles/multirotor/api/MultirotorRpcLibClient.hpp"
int getOneImage()
{
using namespace msr::airlib;
// 对于汽车使用 CarRpcLibClient
MultirotorRpcLibClient client;
std::vector<uint8_t> png_image = client.simGetImage("0", VehicleCameraBase::ImageType::Scene);
// 对图像进行处理
}
更灵活地获取图像¶
simGetImages API 使用起来比 simGetImage 稍微复杂,例如,您可以在单个 API 调用中获取左侧相机视图、右侧相机视图和左侧相机的深度图像。simGetImages API 还允许您获取无压缩图像以及浮点单通道图像(而不是 3 通道(RGB),每个 8 位)。
Python¶
import airsim #pip install airsim
# 对于汽车使用 CarClient()
client = airsim.MultirotorClient()
responses = client.simGetImages([
# png 格式
airsim.ImageRequest(0, airsim.ImageType.Scene),
# 无压缩 RGB 数组字节
airsim.ImageRequest(1, airsim.ImageType.Scene, False, False),
# 浮点无压缩图像
airsim.ImageRequest(1, airsim.ImageType.DepthPlanar, True)])
# 处理包含图像数据、姿态、时间戳等的响应
使用 AirSim 图像与 NumPy¶
如果您计划使用 numpy 进行图像处理,您应该获取无压缩 RGB 图像,然后像这样转换为 numpy:
responses = client.simGetImages([airsim.ImageRequest("0", airsim.ImageType.Scene, False, False)])
response = responses[0]
# 获取 numpy 数组
img1d = np.fromstring(response.image_data_uint8, dtype=np.uint8)
# 将数组重塑为 4 通道图像数组 H X W X 4
img_rgb = img1d.reshape(response.height, response.width, 3)
# 原始图像是垂直翻转的
img_rgb = np.flipud(img_rgb)
# 写入 png
airsim.write_png(os.path.normpath(filename + '.png'), img_rgb)
快速提示¶
-
API
simGetImage返回的是binary string literal,这意味着您可以简单地将其转储到二进制文件中以创建 .png 文件。然而,如果您想以任何其他方式处理它,可以使用便捷函数airsim.string_to_uint8_array。该函数将二进制字符串字面值转换为 NumPy uint8 数组。 -
API
simGetImages可以接受来自任何相机的多种图像类型的请求。在单次调用中,您可以指定图像是 png 压缩的、RGB 无压缩的或浮点数组。对于 png 压缩图像,您会得到binary string literal。对于浮点数组,您将获得 Python 的 float64 列表。您可以使用以下语句将此浮点数组转换为 NumPy 2D 数组:airsim.list_to_2d_float_array(response.image_data_float, response.width, response.height)您还可以使用airsim.write_pfm()函数将浮点数组保存为 .pfm 文件(可携带浮点图格式)。 -
如果您希望在调用其中一个图像 API 时查询位置信息和方向信息,可以使用
client.simPause(True)和client.simPause(False)在调用图像 API 和查询所需物理状态时暂停仿真,确保物理状态在图像 API 调用后立即保持不变。
C++¶
int getStereoAndDepthImages()
{
using namespace msr::airlib;
typedef VehicleCameraBase::ImageRequest ImageRequest;
typedef VehicleCameraBase::ImageResponse ImageResponse;
typedef VehicleCameraBase::ImageType ImageType;
// 对于汽车使用
// CarRpcLibClient client;
MultirotorRpcLibClient client;
// 获取右侧、左侧和深度图像。前两个为 png,后一个为 float16。
std::vector<ImageRequest> request = {
// png 格式
ImageRequest("0", ImageType::Scene),
// 无压缩 RGB 数组字节
ImageRequest("1", ImageType::Scene, false, false),
// 浮点无压缩图像
ImageRequest("1", ImageType::DepthPlanar, true)
};
const std::vector<ImageResponse>& response = client.simGetImages(request);
// 对包含图像数据、姿态、时间戳等的响应进行处理
}
准备运行的完整示例¶
Python¶
有关更完整的准备运行样例代码,请参见 AirSimClient 项目中的示例代码 (用于多旋翼)或 HelloCar 示例。该代码还演示了简单的活动,如将图像保存到文件或使用 numpy 处理图像。
C++¶
有关更完整的准备运行样例代码,请参见 HelloDrone 项目中的示例代码 (用于多旋翼)或 HelloCar 项目。
另请参见 其他示例代码,该代码生成指定数量的立体图像以及真实深度和视差,并将其保存为 pfm 格式。
可用相机¶
这些是每个车辆中默认可用的相机。除了这些,您还可以通过 设置 向车辆和未连接任何车辆的外部相机添加更多相机。
汽车¶
汽车上的相机可以通过 API 调用中的以下名称访问:front_center、front_right、front_left、fpv 和 back_center。这里,FPV 相机是汽车中驾驶员的头部位置。
多旋翼¶
无人机上的相机可以通过 API 调用中的以下名称访问:front_center、front_right、front_left、bottom_center 和 back_center。
计算机视觉模式¶
相机名称与多旋翼相同。
相机名称的向后兼容性¶
在 AirSim v1.2 之前,使用 ID 编号而不是名称访问相机。为了向后兼容,您仍可以使用上述相机名称的 ID 编号,顺序如下:"0"、"1"、"2"、"3"、"4"。此外,相机名称 "" 也可用来访问通常是相机 "0" 的默认相机。
"计算机视觉" 模式¶
您可以在所谓的 "计算机视觉" 模式下使用 AirSim。在此模式下,物理引擎被禁用,且没有车辆,只有相机(如果您想使用车辆但没有其运动学,可以使用带有物理引擎的多旋翼模式 ExternalPhysicsEngine)。您可以使用键盘移动(使用 F1 查看键位帮助)。您可以按录制按钮持续生成图像。或者,您可以调用 APIs 移动相机并拍摄图像。
要激活此模式,请编辑您可以在 Documents\AirSim 文件夹中找到的 settings.json(或者在 Linux 上为 ~/Documents/AirSim),确保以下值在根级别存在:
{
"SettingsVersion": 1.2,
"SimMode": "ComputerVision"
}
此模式受到了 UnrealCV 项目 的启发。
在计算机视觉模式下设置姿态¶
要使用 APIs 在环境中移动,可以使用 simSetVehiclePose API。该 API 接受位置和方向,并将其设置在不可见的车辆上,前中心相机位于该位置。其他所有相机均会保持相对位置一起移动。如果您不想更改位置(或方向),则只需将位置(或方向)的组件设置为浮点 NaN 值。simGetVehiclePose 允许检索当前姿态。您还可以使用 simGetGroundTruthKinematics 获取运动的运动学量。许多其他与车辆无关的 API 也可用,例如分割 API、碰撞 API 和相机 API。
相机 API¶
simGetCameraInfo 返回指定相机的姿态(在世界坐标系中,NED 坐标,SI 单位)和视场(以度为单位)。请参见 示例用法。
simSetCameraPose 设置指定相机的姿态,同时将输入姿态作为相对位置和 NED 坐标系中的四元数的组合。便捷的 airsim.to_quaternion() 函数允许将俯仰、滚转、偏航转换为四元数。例如,要将相机-0 设置为 15 度的俯仰,同时保持相同的位置,您可以使用:
camera_pose = airsim.Pose(airsim.Vector3r(0, 0, 0), airsim.to_quaternion(0.261799, 0, 0)) # PRY 以弧度表示
client.simSetCameraPose(0, camera_pose);
simSetCameraFov允许在运行时更改相机的视场。simSetDistortionParams、simGetDistortionParams允许设置和获取失真参数 K1、K2、K3、P1、P2。
所有相机 API 除了特定于 API 的参数外,还接受 3 个通用参数:camera_name(字符串)、vehicle_name(字符串)和 external(布尔值,指示 外部相机)。相机和车辆名称用于获取特定相机,如果 external 设置为 true,则车辆名称将被忽略。有关这些 API 的示例用法,请参见 external_camera.py。
云台¶
您可以通过 设置 为任何相机设置俯仰、滚转或偏航的稳定性。
请参见 示例用法。
更改分辨率和相机参数¶
要更改分辨率、视场等,可以使用 settings.json。例如,以下设置会在 settings.json 中添加参数以进行场景捕获,并使用上面描述的 "计算机视觉" 模式。如果您省略任何设置,则将使用以下默认值。有关更多信息,请参见 设置文档。如果您使用立体摄像机,当前左右之间的距离固定为 25 厘米。
{
"SettingsVersion": 1.2,
"CameraDefaults": {
"CaptureSettings": [
{
"ImageType": 0,
"Width": 256,
"Height": 144,
"FOV_Degrees": 90,
"AutoExposureSpeed": 100,
"MotionBlurAmount": 0
}
]
},
"SimMode": "ComputerVision"
}
不同图像类型中像素值的含义是什么?¶
可用图像类型值¶
Scene = 0,
DepthPlanar = 1,
DepthPerspective = 2,
DepthVis = 3,
DisparityNormalized = 4,
Segmentation = 5,
SurfaceNormals = 6,
Infrared = 7,
OpticalFlow = 8,
OpticalFlowVis = 9
DepthPlanar 和 DepthPerspective¶
您通常希望以浮点形式检索深度图像(即,设置 pixels_as_float = true)并在 ImageRequest 中指定 ImageType = DepthPlanar 或 ImageType = DepthPerspective。对于 ImageType = DepthPlanar,您在相机平面中获得深度,即,与相机平行的所有点具有相同的深度。对于 ImageType = DepthPerspective,您使用命中该像素的投影光线从相机获取深度。根据您的用例,平面深度或透视深度可能是您想要的真实图像。例如,您可以将透视深度传输到 ROS 包,例如 depth_image_proc 以生成点云。或者平面深度可能更兼容于由立体算法(例如 SGM)生成的估计深度图像。
DepthVis¶
当您在 ImageRequest 中指定 ImageType = DepthVis 时,您会获得一个有助于深度可视化的图像。在这种情况下,每个像素值根据相机平面中的深度(以米为单位)从黑色插值到白色。像素纯白表示深度为 100 米或更大,而纯黑表示深度为 0 米。
DisparityNormalized¶
您通常希望以浮点形式检索视差图像(即,设置 pixels_as_float = true 并在 ImageRequest 中指定 ImageType = DisparityNormalized),在这种情况下,每个像素为 (Xl - Xr)/Xmax,因此被规范化为 0 到 1 之间的值。
Segmentation¶
当您在 ImageRequest 中指定 ImageType = Segmentation 时,您会获得一个提供场景真实分割的图像。在启动时,AirSim 为环境中可用的每个网格分配值 0 到 255。该值随后映射到 调色板 中的特定颜色。每个对象 ID 的 RGB 值可以在 此文件中找到。
{kind=link}
您可以使用 API 为特定网格分配特定值(限于 0-255 范围)。例如,以下 Python 代码将块环境中名为 "Ground" 的网格的对象 ID 设置为 20,从而改变其在分割视图中的颜色:
success = client.simSetSegmentationObjectID("Ground", 20);
返回值为布尔类型,让您知道是否找到该网格。
请注意,典型的 Unreal 环境(如 Blocks)通常有许多其他网格组成同一对象,例如 "Ground_2"、"Ground_3" 等。因为为所有这些网格设置对象 ID 是繁琐的,AirSim 还支持正则表达式。例如,以下代码将所有名称以 "ground" 开头(不区分大小写)的网格设置为 21,只需一行代码:
success = client.simSetSegmentationObjectID("ground[\w]*", 21, True);
返回值为 true 表示使用正则表达式匹配至少找到了一个网格。
建议您使用此 API 请求无压缩图像,以确保获得分割图像的精确 RGB 值:
responses = client.simGetImages([ImageRequest(0, AirSimImageType.Segmentation, False, False)])
img1d = np.fromstring(response.image_data_uint8, dtype=np.uint8) #获取 numpy 数组
img_rgb = img1d.reshape(response.height, response.width, 3) #将数组重塑为 3 通道图像数组 H X W X 3
img_rgb = np.flipud(img_rgb) #原始图像是垂直翻转的
# 查找唯一颜色
print(np.unique(img_rgb[:,:,0], return_counts=True)) #红色
print(np.unique(img_rgb[:,:,1], return_counts=True)) #绿色
print(np.unique(img_rgb[:,:,2], return_counts=True)) #蓝色
可以在 segmentation.py 中找到完整的准备运行示例。
取消设置对象 ID¶
可以将对象的 ID 设置为 -1,以使其在分割图像中不显示。
如何找到网格名称?¶
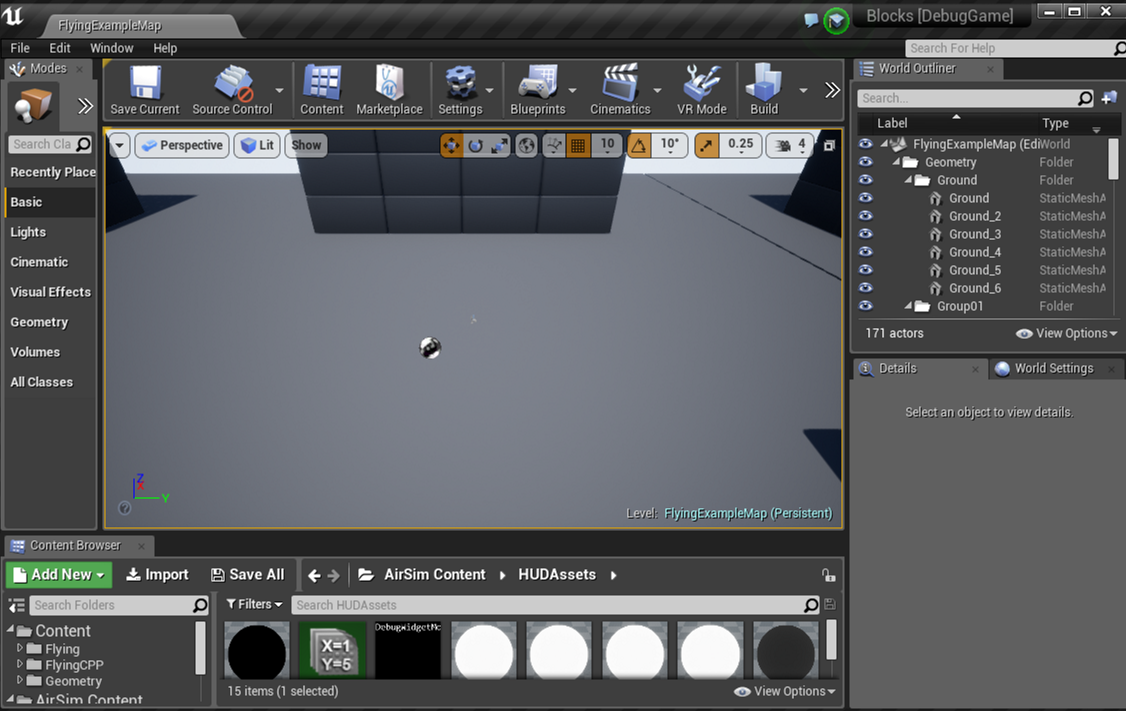
要获得所需的真实分割,您需要知道 Unreal 环境中网格的名称。为此,您需要在 Unreal 编辑器中打开 Unreal 环境,然后使用世界大纲检查您感兴趣的网格的名称。例如,以下是 Blocks 环境中右侧面板中地面的网格名称:
如果您不知道如何在 Unreal 编辑器中打开 Unreal 环境,请尝试按照 从源构建 的指南进行操作。
一旦您确定感兴趣的网格,请记下它们的名称并使用上述 API 设置其对象 ID。可以通过 一些设置 更改对象 ID 生成行为。
更改对象 ID 的颜色¶
目前每个对象 ID 的颜色是固定的,如 此调色板 所示。我们将很快添加更改对象 ID 颜色为所需值的功能。在此期间,您可以在您最喜欢的图像编辑器中打开分割图像,并获取您感兴趣的 RGB 值。
启动对象 ID¶
在开始时,AirSim 为在环境中找到的每个类型为 UStaticMeshComponent 或 ALandscapeProxy 的对象分配对象 ID。然后,它使用网格名称或所有者名称(取决于设置),将其小写,删除 ASCII 97 以下的任何字符以去除数字和某些标点符号,求和所有字符的整数值并取模 255 来生成对象 ID。换句话说,所有具有相同字母字符的对象将获得相同对象 ID。这一启发式方法对许多 Unreal 环境有效,但可能不是您所需的。在这种情况下,请使用上述 APIs 将对象 ID 更改为您所需的值。有 一些设置 可用于更改此行为。
获取网格的对象 ID¶
simGetSegmentationObjectID API 允许您获取给定网格名称的对象 ID。
红外¶
当前这只是从对象 ID 到灰度 0-255 的映射。因此,任何对象 ID 为 42 的网格将显示为颜色 (42, 42, 42)。有关如何设置对象 ID 的更多详细信息,请参见 分割部分。通常可以对该图像类型应用噪声设置,以获得稍微更加真实的效果。我们仍在努力添加其他红外伪影,欢迎任何贡献。
光流和光流可视化¶
这些图像类型返回相机视角下感知运动的信息。光流返回一个 2 通道图像,通道对应于 vx 和 vy。光流可视化与光流相似,但将流数据转换为 RGB 以获得更“可视化”的输出。
示例代码¶
设置车辆在随机位置和方向的完整示例,以及拍摄图像的代码可以在 GenerateImageGenerator.hpp 中找到。该示例生成指定数量的立体图像和真实的视差图像,并将其保存为 pfm 格式。