日志查看器¶
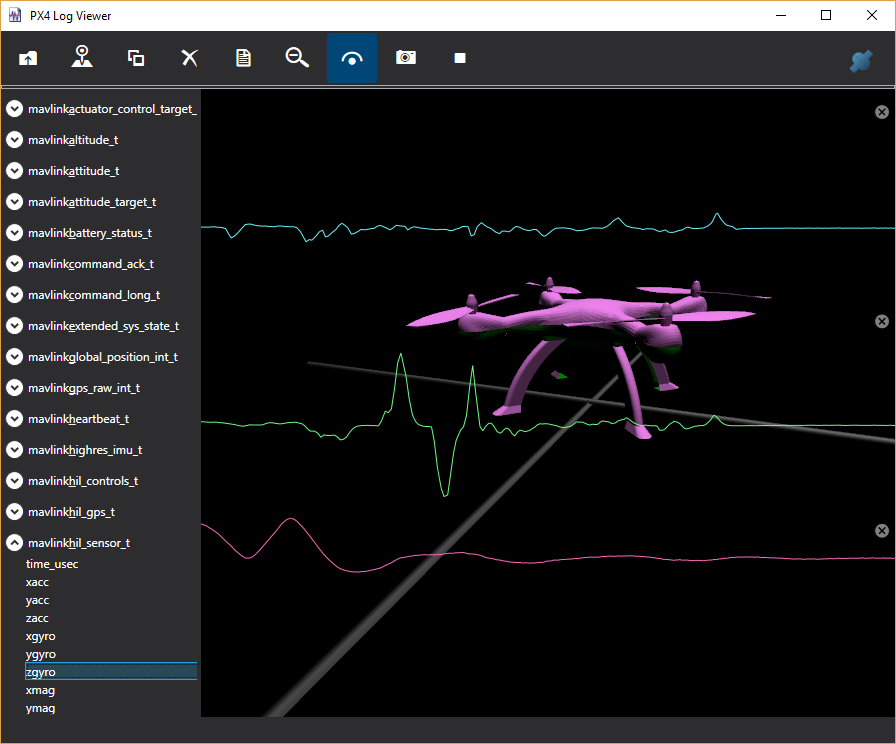
日志查看器是一个 Windows WPF 应用程序,展示了它从 Unreal Simulator 获取的 MavLink 流。您可以使用它来监控无人机飞行时发生的事情。例如,下面的图片显示了模拟器生成的 x、y 和 z 陀螺仪传感器信息的实时图表。
用法¶
您可以打开一个日志文件,它支持 .mavlink 和 PX4 *.ulg 文件,然后您将在左侧树视图中看到日志的内容。无论您选择哪个指标,都会添加到右侧。您可以通过每个图表右上角的小关闭框关闭每个单独的图表,并且可以使用顶部工具栏上的分组图表按钮将图表分组,以便它们共享相同的纵轴。
还有一个地图选项,可以绘制无人机的 GPS 路径。您还可以加载多个日志文件,以便比较它们之间的数据。
实时¶
如果在运行模拟之前连接日志查看器,您也可以得到实时视图。
为了使其正常工作,您需要使用以下设置配置 settings.json:
{
"SettingsVersion": 1.2,
"SimMode": "Multirotor",
"Vehicles": {
"PX4": {
...,
"LogViewerHostIp": "127.0.0.1",
"LogViewerPort": 14388,
}
}
}
注意:当您想要实时日志查看器记录时,请不要使用“日志”设置。使用“日志”记录到文件与日志查看器记录是相互排斥的。
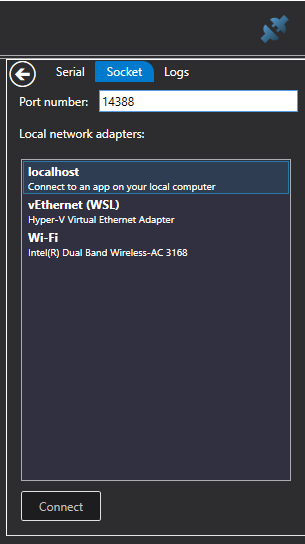
只需按下窗口右上角的蓝色连接器按钮,选择 Socket 选项卡,输入端口号码 14388,以及您的 localhost 网络。如果您在 Windows 上使用 WSL 2,请选择 vEthernet (WSL)。
如果您选择 vEthernet (WSL),确保还将 LocalHostIp 和 LogViewerHostIp 设置为匹配的 WSL 以太网地址,类似于 172.31.64.1。
然后按下记录按钮(工具栏右侧的三角形)。现在启动模拟器,数据将开始流入日志查看器。
日志查看器中的无人机视图显示来自 PX4 的实际估计位置,因此这是检查 PX4 是否与模拟器同步的好方法。有时您可能会在这里看到一些漂移,因为姿态估计跟上现实,这在一次严重碰撞后可能会更加明显。
安装¶
如果您无法构建 LogViewer.sln,还有一个 点击安装程序。
配置¶
神奇的端口号 14388 可以通过编辑 settings.json 文件 在模拟器中进行配置。如果您在日志查看器连接对话框中更改端口号,请确保在您的 settings.json 文件中进行相应的更改。
调试¶
有关如何使用日志查看器调试您设置的情况的更多信息,请参见 PX4 Logging。