目标检测¶
介绍¶
此功能允许您使用 AirSim 中现有的相机生成目标检测,类似于检测 DNN。
使用 API,您可以按名称和距离相机的半径控制要检测的对象。
可以单独为每个相机、图像类型和车辆组合控制这些设置。
API¶
-
以通配符格式设置要检测的网格名称
simAddDetectionFilterMeshName(camera_name, image_type, mesh_name, vehicle_name = '') -
清除之前添加的所有网格名称
simClearDetectionMeshNames(camera_name, image_type, vehicle_name = '') -
以厘米为单位设置检测半径
simSetDetectionFilterRadius(camera_name, image_type, radius_cm, vehicle_name = '') -
获取检测结果
simGetDetections(camera_name, image_type, vehicle_name = '')
simGetDetections 的返回值是一个 DetectionInfo 数组:
DetectionInfo
name = ''
geo_point = GeoPoint()
box2D = Box2D()
box3D = Box3D()
relative_pose = Pose()
使用示例¶
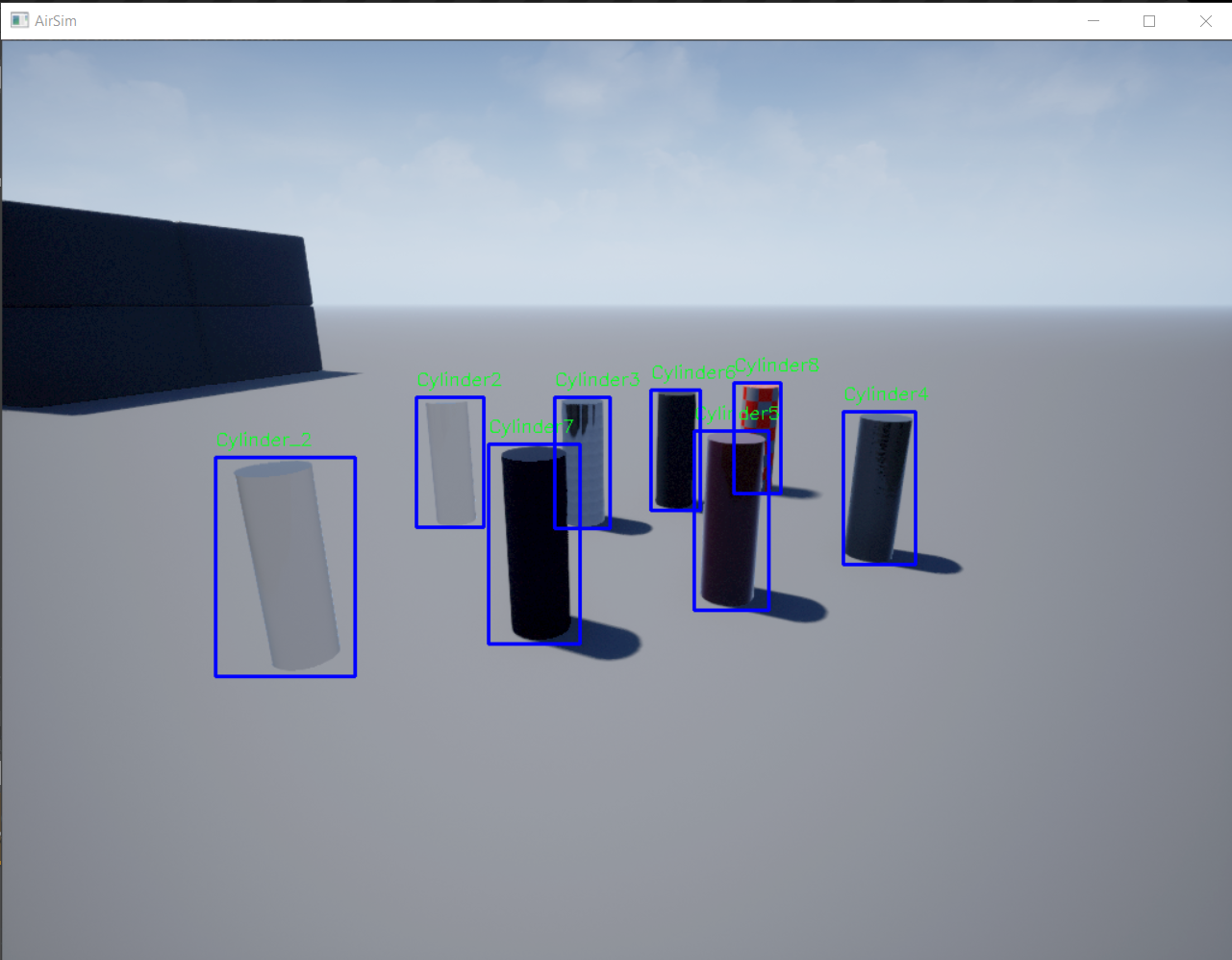
Python 脚本 detection.py 显示如何设置检测参数,并在 OpenCV 捕获中显示结果。
一个使用 API 在 Blocks 环境中检测 Cylinder 对象的最小示例:
camera_name = "0"
image_type = airsim.ImageType.Scene
client = airsim.MultirotorClient()
client.confirmConnection()
client.simSetDetectionFilterRadius(camera_name, image_type, 80 * 100) # 单位为 [cm]
client.simAddDetectionFilterMeshName(camera_name, image_type, "Cylinder_*")
client.simGetDetections(camera_name, image_type)
detections = client.simClearDetectionMeshNames(camera_name, image_type)
输出结果:
Cylinder: <DetectionInfo> { 'box2D': <Box2D> { 'max': <Vector2r> { 'x_val': 617.025634765625,
'y_val': 583.5487060546875},
'min': <Vector2r> { 'x_val': 485.74359130859375,
'y_val': 438.33465576171875}},
'box3D': <Box3D> { 'max': <Vector3r> { 'x_val': 4.900000095367432,
'y_val': 0.7999999523162842,
'z_val': 0.5199999809265137},
'min': <Vector3r> { 'x_val': 3.8999998569488525,
'y_val': -0.19999998807907104,
'z_val': 1.5199999809265137}},
'geo_point': <GeoPoint> { 'altitude': 16.979999542236328,
'latitude': 32.28772183970703,
'longitude': 34.864785008379876},
'name': 'Cylinder9_2',
'relative_pose': <Pose> { 'orientation': <Quaternionr> { 'w_val': 0.9929741621017456,
'x_val': 0.0038591264747083187,
'y_val': -0.11333247274160385,
'z_val': 0.03381215035915375},
'position': <Vector3r> { 'x_val': 4.400000095367432,
'y_val': 0.29999998211860657,
'z_val': 1.0199999809265137}}}