PX4/MavLink 日志记录¶
感谢 Chris Lovett 开发的用于 PX4/MavLink 日志记录的各种工具,这些工具在本文中提到!
记录 MavLink 消息¶
如果您在 settings.json 文件的 PX4 部分添加以下内容,AirSim 可以捕获 mavlink 日志文件:
{
"SettingsVersion": 1.2,
"SimMode": "Multirotor",
"Vehicles": {
"PX4": {
...,
"Logs": "c:/temp/mavlink"
}
}
}
AirSim 将在该文件夹中为每次“武装/解除武装”飞行会话创建一个带时间戳的日志文件。
然后,您将在 d:\temp\logs 中看到按日期组织的日志文件,具体为 input.mavlink 和 output.mavlink 文件。
MavLink LogViewer¶
对于启用 MavLink 的无人机,您还可以使用我们的 Log Viewer 可视化数据流。 如果您启用这种实时日志记录方式,您应该不要使用上面的“Logs”设置,这两种日志记录方式是互斥的。
PX4 在 SITL 模式下的日志¶
在 SITL 模式下,无人机武装时会生成日志文件。SITL 终端将包含日志文件的路径,应该类似于这样:
INFO [logger] Opened log file: rootfs/fs/microsd/log/2017-03-27/20_02_49.ulg
PX4 在 HITL 模式下的日志¶
如果您在 HIL 模式下使用 Pixhawk 硬件,请使用 QGroundControl 设置参数 SYS_LOGGER=1。PX4 将在设备上写入日志文件,您可以在之后使用 QGroundControl 下载。
调试不良飞行¶
您可以使用这些 *.mavlink 日志文件使用 LogViewer 调试不良飞行。 例如,如果您在计算能力不足的计算机上运行 AirSim/PX4 飞行,可能会出现异常行为。 以下展示了在这种情况下可能发生的情况。
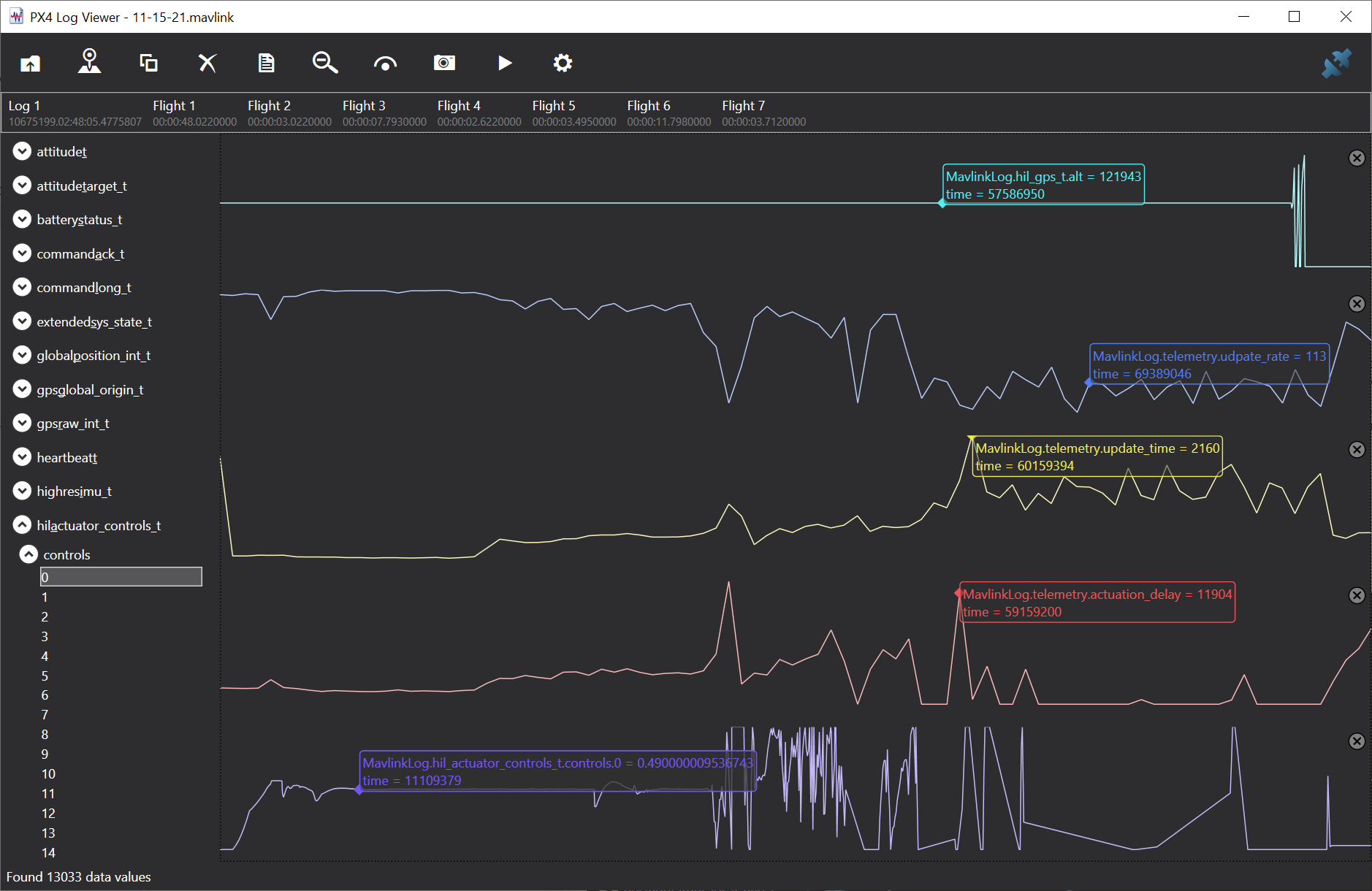
在这次飞行中,我们运行了一个简单的 commander takeoff 测试,执行者为 PythonClient/multirotor/stability_test.py,飞行开始时一切正常,但最后变得疯狂,导致无人机坠毁。那么这是怎么回事呢?日志文件能显示什么呢?
我们绘制了以下五个指标:
- hil_gps.alt - 从 AirSim 发送到 PX4 的模拟高度
- telemetry.update_rate - AirSim 进行关键无人机更新循环的更新率(每秒更新次数)
- telemetry.update_time - 在 AirSim 中执行关键无人机更新循环的平均时间
- telemetry.actuation_delay - 这是一个非常有趣的指标,测量 PX4 发送更新的执行器控制消息(电机功率)所需的时间
- actuator_controls.0 - 从 PX4 获取的第一个转子的执行器控制信号
通过这些指标,我们观察到起初一切顺利,高度保持平稳,更新率处于 275 到 300 fps 范围内,AirSim 中的更新时间保持在 113 微秒左右,并且从 PX4 的往返延迟很低。执行器控制信号也迅速稳定在一条平坦的线。
但随后更新时间开始上升,与此同时,执行延迟也在上升,我们看到执行器控制出现小幅下滑。 这个下滑是不应该发生的,PX4 因更新率丢失而恐慌,但它恢复了。
然后我们看到执行器控制变得疯狂,执行延迟出现巨大峰值,同时我们收到来自 AirSim 的消息 lockstep disabled。超过 100 毫秒的延迟触发 AirSim 跳出锁步模式,PX4 失控,无人机坠毁。
关键是,如果一个简单的 takeoff 无法保持稳定平稳的飞行,并且您看到这些尖峰和不均匀的更新率,那么这意味着您在一个计算能力不足的计算机上运行 AirSim。
这就是一个简单起飞、悬停和着陆应该呈现的样子:
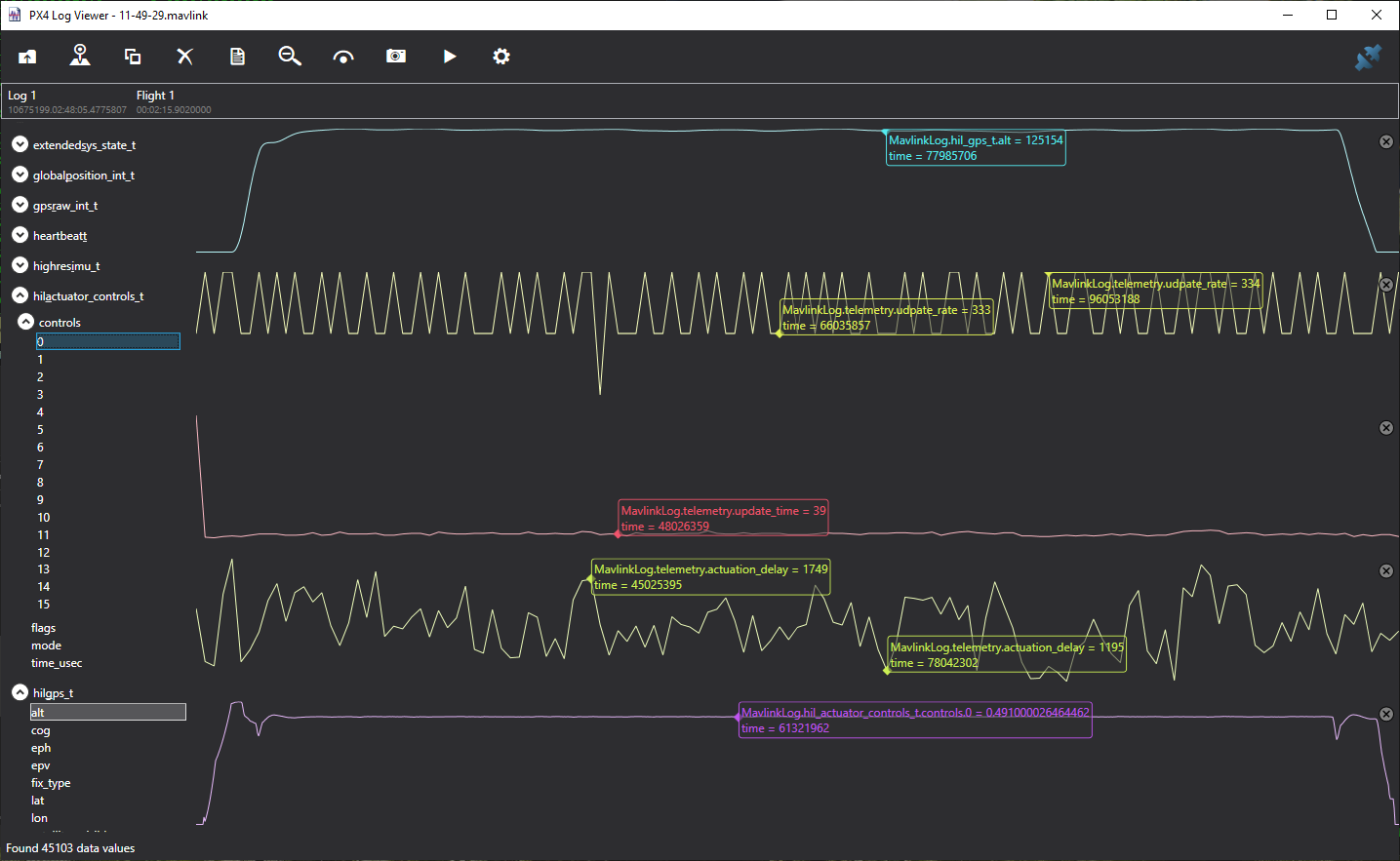
这里您可以看到 update_rate 保持在每秒 333 次更新的目标值。
您还可以看到 update_time 平稳在 39 微秒左右,以及 actuator_delay 在 1.1 毫秒到 1.7 毫秒之间,而结果 actuator_controls 则是一条完美的平坦线。