体素网格生成器
AirSim 提供了一项功能,可以直接从 Unreal Engine 构建世界的真实体素网格。体素网格是对给定世界/地图的占用情况的表示,通过离散化为一定大小的单元格;如果某个特定位置被占用,则记录一个体素。
构建体素网格的逻辑在 WorldSimApi.cpp->createVoxelGrid() 中。目前的假设是体素网格是一个立方体——从 Python 的 API 调用结构如下:
simCreateVoxelGrid(self, position, x, y, z, res, of)
- position (Vector3r): 体素网格中心的全球位置,单位为米
- x, y, z (float): 每个体素网格维度的大小,单位为米
- res (float): 体素网格的分辨率,单位为米
- of (str): 要保存体素网格的输出文件名
在 createVoxelGrid() 中,返回占用情况的主要 Unreal Engine 函数是 OverlapBlockingTestByChannel。
OverlapBlockingTestByChannel(position, rotation, ECollisionChannel, FCollisionShape, params);
该函数在我们希望分离地图的所有“单元格”的位置上被调用,返回的占用结果被收集到数组 voxel_grid_ 中。单元格占用值的索引遵循 binvox 格式的约定。
for (float i = 0; i < ncells_x; i++) {
for (float k = 0; k < ncells_z; k++) {
for (float j = 0; j < ncells_y; j++) {
int idx = i + ncells_x * (k + ncells_z * j);
FVector position = FVector((i - ncells_x /2) * scale_cm, (j - ncells_y /2) * scale_cm, (k - ncells_z /2) * scale_cm) + position_in_UE_frame;
voxel_grid_[idx] = simmode_->GetWorld()->OverlapBlockingTestByChannel(position, FQuat::Identity, ECollisionChannel::ECC_Pawn, FCollisionShape::MakeBox(FVector(scale_cm /2)), params);
}
}
}
地图的占用情况是逐个离散化的单元格迭代计算的,这可能会是一个密集的操作,具体取决于单元格的分辨率和被测量区域的总大小。如果用户感兴趣的地图变化不大,可以对该地图运行一次体素网格操作,并保存体素网格以供重用。为了性能,或在动态环境中,我们建议对机器人周围的小区域运行体素网格生成;随后将其用于本地规划目的。
体素网格以 binvox 格式存储,用户可以将其转换为 octomap .bt 或其他任何相关的所需格式。随后,这些体素网格/octomaps 可以在映射/规划中使用。一个用于可视化创建的 binvox 文件的小工具是 viewvox。类似地,binvox2bt 可以将 binvox 转换为 octomap 文件。
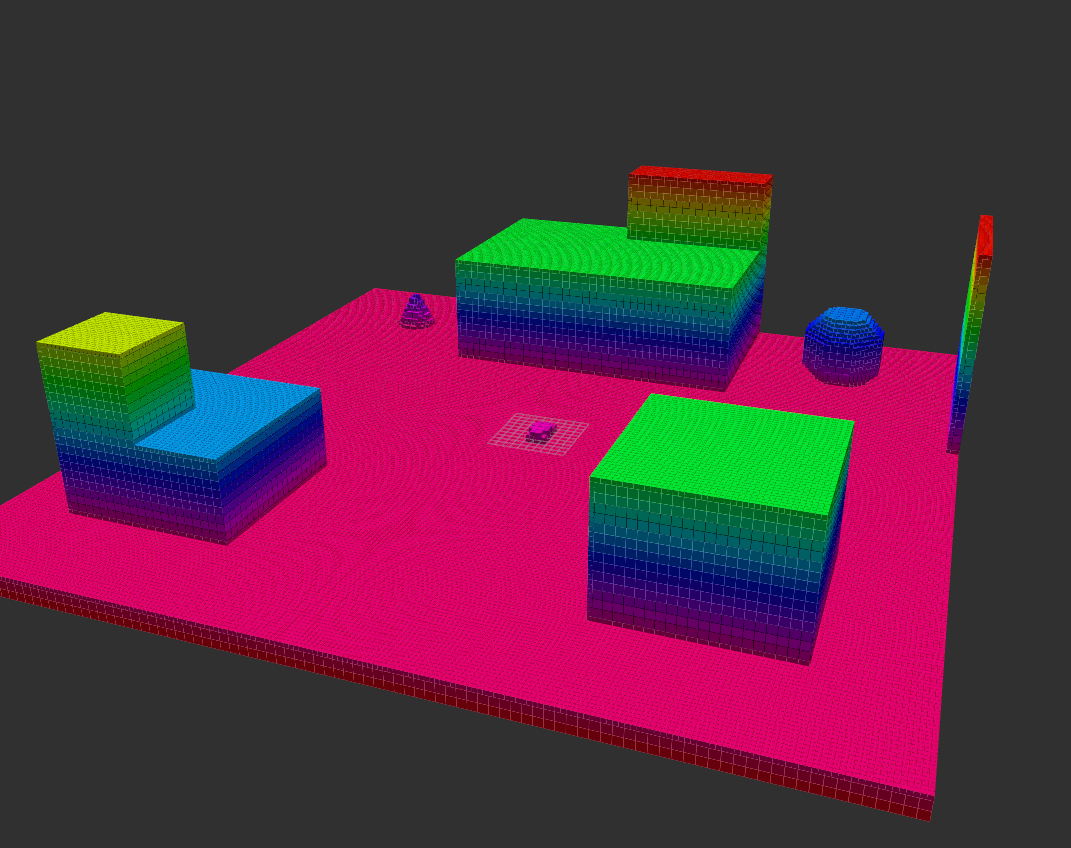
示例体素网格在 Blocks 中:¶
转换为 Octomap 格式的 Blocks 体素网格(在 rviz 中可视化):¶
作为示例,一旦 Blocks 环境启动并运行,可以如下构建体素网格:
import airsim
c = airsim.VehicleClient()
center = airsim.Vector3r(0, 0, 0)
output_path = os.path.join(os.getcwd(), "map.binvox")
c.simCreateVoxelGrid(center, 100, 100, 100, 0.5, output_path)
并通过 viewvox map.binvox 进行可视化。