Skip to content
AirSim中文文档
Working with UE Plugin Contents
Initializing search
AirSim中文文档
关于本站
构建airsim
构建airsim
下载二进制
在Windows中构建
在Linux中构建
在MacOS中构建
Linux中的Docker
在Azure中使用AirSim
创建和设置 Unreal 环境
Unity上的AirSim
创建和设置 Unity 环境
Unity APIs
FAQ
使用AirSim
使用AirSim
核心 APIs
图像 APIs
C++ APIs
API 引用文档
开发工作流
设置
摄像机视图
汽车
远程控制
XBox控制
方向盘
AirSim中的多实体
传感器
传感器
传感器
激光雷达
距离传感器
热红外相机
ROS:airsim_ros_pkgs
AirSim ROS 教程
导入Gazebo模型
域随机化
网格顶点缓冲区
播放日志
体素网格生成器
事件相机
设计
设计
架构
代码结构
增加新APIs
更改记录数据
外部飞控
外部飞控
MavLink与PX4
MavLink与PX4
AirSim安装PX4
PX4 in SITL
PX4 SITL with WSL2
PX4 Lockstep
PX4 Multi-vehicle in SITL
PX4 Setup with AirSim
Debugging Attitude Estimation
拦截 MavLink 消息
PX4 无人机快速降落
Building PX4
PX4/MavLink logging
MavLink LogViewer
MavLinkCom
MavLink MoCap
ArduPilot
ArduPilot
ArduPilot SITL Setup
AitSim & ArduPilot
升级
升级
升级Unreal
升级APIs
升级设置
教程
教程
强化学习
将第三方环境导入虚幻引擎用于 AirSim
避免碰撞的简单示例
自动驾驶的教程
构建一辆六旋翼
moveOnPath demo
构建点云
无人机测绘
环绕轨迹
如何在 AirSim 中使用自定义无人机框架网格
目标检测
AirSim with MAVROS and PX4
杂项
杂项
真实的无人机上使用AirSim
在Linux中安装Cmake
HDD中可能的瓶颈
pfm格式
安装UE
AirSim 设置块环境
Who is Using AirSim
Working with UE Plugin Contents
自动驾驶
支持
支持
FAQ
support
创建 issue
贡献
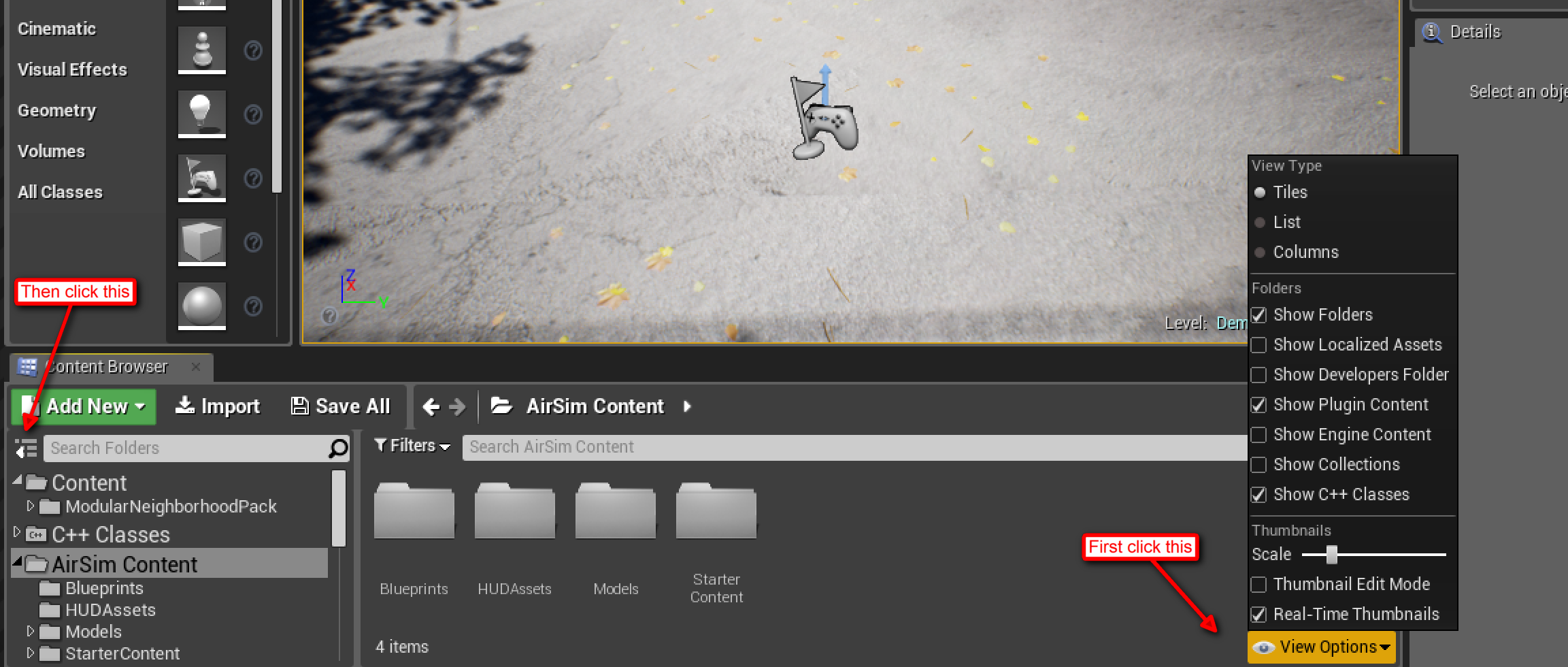
如何使用插件内容
¶
插件内容在 Unreal 项目中默认不显示。要查看插件内容,您需要点击一些半隐藏的按钮:
注意
您在内容文件夹中所做的更改是对二进制文件的更改,请小心。